UMBERTO MANISCALCO
Research fellow
Technological Activity
The activities will focus on the “naturalization” processes of the interactions between humans and robots. Therefore, anthropomorphic models of interaction between humans and robots will be studied and implemented on robotic platforms, mostly humanoid.
In this context, we intend to develop a software framework based on ROS (Robot Operative System) architecture consisting of high-level cognitive functions to more easily to implement and test the interaction paradigms to be developed. Part of the activity is aimed at the management and maintenance of robots and hardware and software infrastructures that make up this framework.
The group mainly carries out activities on the non-verbal aspects of communication, both of content and control. That is the signals that flow on the main channel, in which the contents of the interaction are communicated and on the backchannel through which interaction control information is exchanged.
Both hardware and software solutions are studied and adapted to the specific field of robotics for:
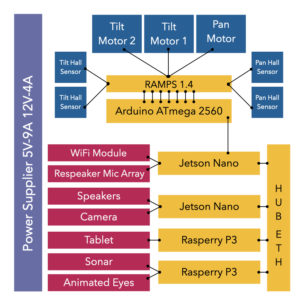
The group also wants to engage in the challenge of designing and building an original hardware robotic platform that overcomes the limits of current low-cost robotic platforms.
The idea is, in a first phase, to experiment with the available technologies and verify their adequacy with respect to the algorithms to be used. Then proceed to a system integration phase in order to arrive at a complete robotic prototype but still, laboratory (not engineered), to finally move on to the declination of some products derived from the prototype with final product characteristics.
Goals
The main goal is to implement new anthropomorphic models of interaction between humans and robots to naturalize the interaction.
The main goal implies endowing the robot with the ability to both perceive and interpret the communication flowing from man to the robot. But also with the expressive capabilities of the robot that can be intuitively decoded by the interlocutor. Then obtain new hardware and software solutions for understanding and generating multimodal bidirectional signals for communication through the main channel and backchannel.
Application Fields
The main fields of application are education, where the interaction between robots and children can support teaching methods. Cultural heritage, or museum assistance in which the skills of interpretation could indicate an innovation for this application field. Medicine, in particular aftercare for patients.


Research product
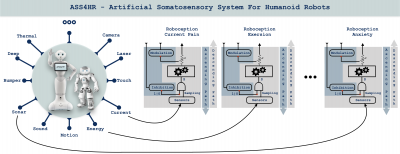 ASS4HR ASS4HR is both a design and a ROS (Robot Operating System) implementation of an artificial somatosensory system for a humanoid robot. The design takes inspiration from the biological model and has been adapted to the robot’s characteristics. The implementation is based on the use of the soft sensors paradigm.
ASS4HR ASS4HR is both a design and a ROS (Robot Operating System) implementation of an artificial somatosensory system for a humanoid robot. The design takes inspiration from the biological model and has been adapted to the robot’s characteristics. The implementation is based on the use of the soft sensors paradigm.
ASS4HR allows the robot to experience sensations that we call “roboceptions”, exploiting from the measurements of the basic sensors it is equipped with. This way, the robot is aware of its physical condition and can adapt its behavior.
For each “roboception” that constitutes the artificial somatosensory system, both the ascending path and the descending path have been implemented. Therefore, ASS4HR allows you to experience, modulate or inhibit the “roboceptions”. By doing so, each robot can have its own character.
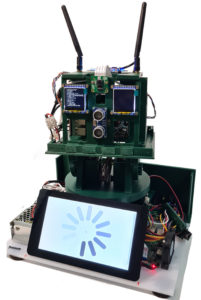
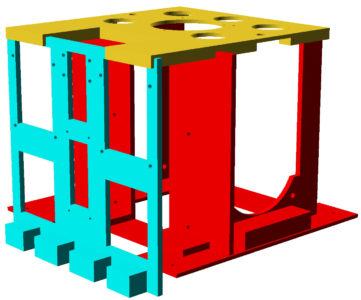
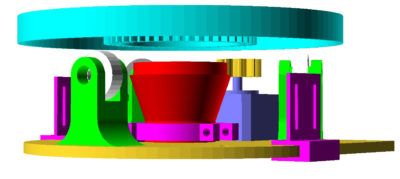
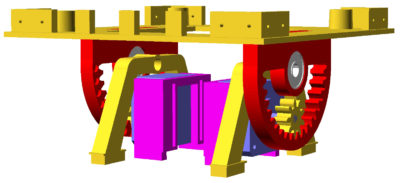
Q-ro Project
The idea of designing and building Q-ro, starting from scratch, allowed us to bring together many of the best features of robots already created in a single project. The project originates from the following considerations:
• Limitations: Low to medium-cost robots have numerous functional and technical-operational limitations;
• Accessibility of resources: commercial platforms such as Pepper and Nao, among the most popular today as social robots, do not allow full access to hardware resources and have a proprietary SDK;
• Costs: platforms with many features are expensive and cannot be used in small and medium-sized projects except as one-time prototypes. An experiment with dozens of robots costing tens of thousands of dollars/euros per robot is virtually unimaginable;
• Functionality: design and build a robot, which costs a few hundred dollars/euros, equipped with most of the functions of more expensive robots;
• Scalability: design and build a modular and scalable robot, which allows obtaining, from time to time, appropriate prototypes for specific applications