UMBERTO MANISCALCO
Tecnologo
Descrizione Attività
Le attività saranno focalizzate sui processi di “naturalizzazione” delle interazioni tra l’uomo e i robot. Quindi, si studieranno e implementeranno su piattaforme robotiche, per lo più umanoidi, modelli antropomorfici di interazione tra uomo e robot.
In questo contesto, si intende sviluppare un framework software basato su architettura ROS (Robot Operative System) costituito da funzioni cognitive di alto livello così da implementare e testare più facilmente i paradigmi di interazione che si intendono sviluppare. Un parte di attività è rivolta alla gestione e manutenzione dei robot e delle infrastrutture hardware e software che costituiscono questo framework.
Il gruppo svolge attività principalmente sugli aspetti non verbali della comunicazione, sia di contenuto che di controllo. Ovvero, i segnali che fluiscono sul main channel, il canale in cui vengono comunicati i contenuti dell’interazione e sul backchannel attraverso il quale vengono scambiate informazioni di controllo dell’interazione.
Si studiano e adattano allo specifico campo della robotica soluzioni sia hardware sia software per:
Il gruppo vuole inoltre impegnarsi nella sfida di progettare e realizzare una piattaforma robotica hardware originale che superi i limiti delle attuali piattaforme robotiche low cost.
L’idea è quella, in una prima fase, di sperimentare le tecnologie disponibili e verificarne l’adeguatezza rispetto agli algoritmi che si intendono utilizzare. Procedere quindi ad una fase di integrazione di sistemi al fine di giungere ad un prototipo robotico completo ma ancora da laboratorio (non ingegnerizzato), per infine passare alla declinazione di alcuni prodotti derivati dal prototipo con caratteristiche di prodotto finale.
Obiettivi
L’obiettivo complessivo è di implementare nuovi modelli antropomorfici di interazione tra uomo e robot per naturalizzare l’interazione.
Questo implica dotare il robot di capacità sia di percepire sia di interpretare la comunicazione che fluisce dall’uomo verso il robot ma anche di capacità espressive del robot intuitivamente decodificabili dall’interlocutore. Quindi ottenere nuove soluzioni sia hardware sia software per la comprensione e la generazione di segnali bidirezionali multimodali per la comunicazione attraverso il mainchannel e il backchannel.
Campi Applicativi
I principali campi applicativi sono: l’education, dove l’interazione tra robot e bambini può supportare metodi didattici. Beni culturali, ovvero assistenza museale in cui le capacità di interpretazione indicale sarebbero una innovazione per questo campo applicativo. Medicina, in particolare assistenza post degenza di pazienti.
Prodotto della ricerca
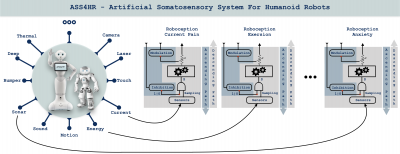 ASS4HR è sia un progetto sia un’implementazione ROS (Robot Operating System) di un sistema somatosensoriale artificiale per un robot umanoide. Il design prende ispirazione dal modello biologico ed è stato adattato alle caratteristiche del robot. L’implementazione si basa sull’uso del paradigma dei soft sensors.
ASS4HR è sia un progetto sia un’implementazione ROS (Robot Operating System) di un sistema somatosensoriale artificiale per un robot umanoide. Il design prende ispirazione dal modello biologico ed è stato adattato alle caratteristiche del robot. L’implementazione si basa sull’uso del paradigma dei soft sensors.
ASS4HR permette al robot di provare sensazioni che noi chiamiamo “roboceptions”, utilizzando i dati dei sensori di base di cui è dotato. In questo modo, il robot è consapevole delle sue condizioni fisiche e può adattare il suo comportamento.
Per ogni “ roboception” che costituisce il sistema somatosensoriale artificiale, è stato implementato sia il percorso ascendente che il percorso discendente. Pertanto, ASS4HR consente di sperimentare, modulare o inibire le “roboceptions”. In questo modo, ogni robot può avere il proprio carattere.
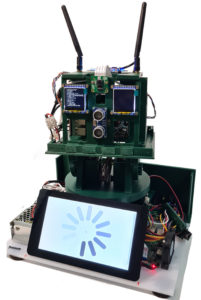
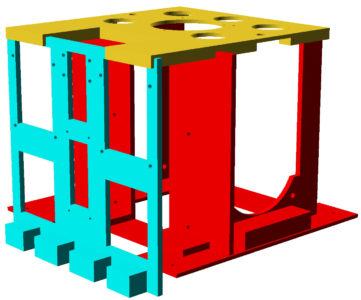
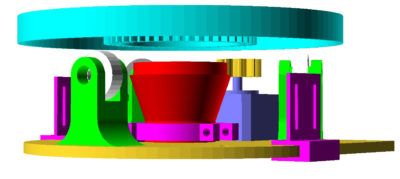
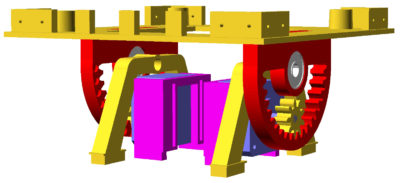
Q-ro Project
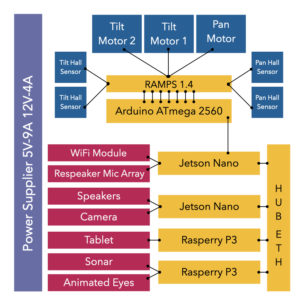
The idea of designing and building Q-ro, starting from scratch, allowed us to bring together many of the best features of robots already created in a single project. The project originates from the following considerations:
• Limitations: Low to medium-cost robots have numerous functional and technical-operational limitations;
• Accessibility of resources: commercial platforms such as Pepper and Nao, among the most popular today as social robots, do not allow full access to hardware resources and have a proprietary SDK;
• Costs: platforms with many features are expensive and cannot be used in small and medium-sized projects except as one-time prototypes. An experiment with dozens of robots costing tens of thousands of dollars/euros per robot is virtually unimaginable;
• Functionality: design and build a robot, which costs a few hundred dollars/euros, equipped with most of the functions of more expensive robots;
• Scalability: design and build a modular and scalable robot, which allows obtaining, from time to time, appropriate prototypes for specific applications